机械臂插件
概述
我们的IdeaXR引擎为用户提供了数字孪生的具体应用——机械臂插件,将真实机械臂的数字孪生放到虚拟生产环境中验证操控步骤的合理性,支持从IdeaXR引擎连接和控制机械臂完成工业应用场景下的一系列操作。
项目运行的效果如下:

插件安装、属性介绍
插件下载安装创建
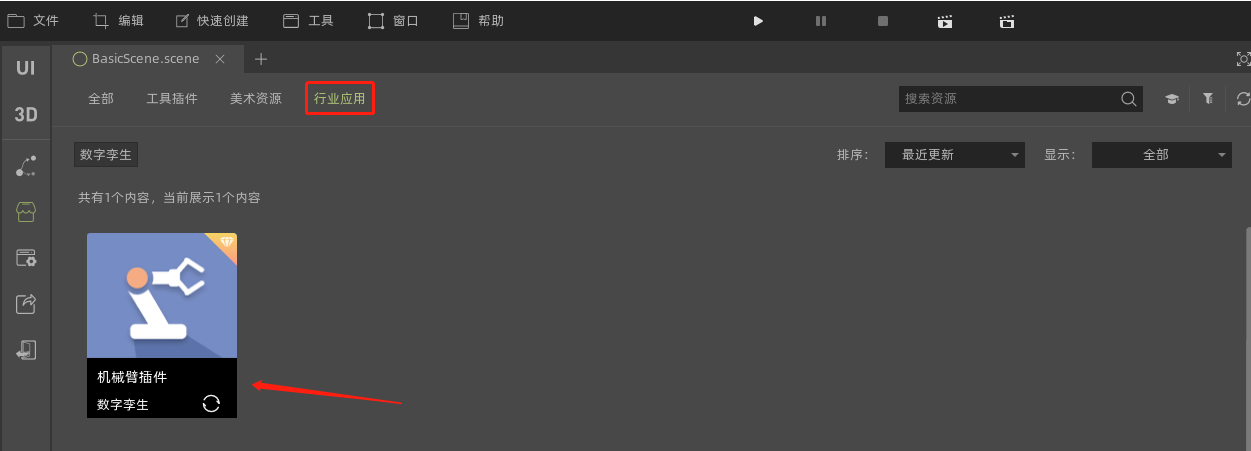
1、在资源库中找到对应的行业应用一栏下机械臂插件,点击下载按钮。如下图
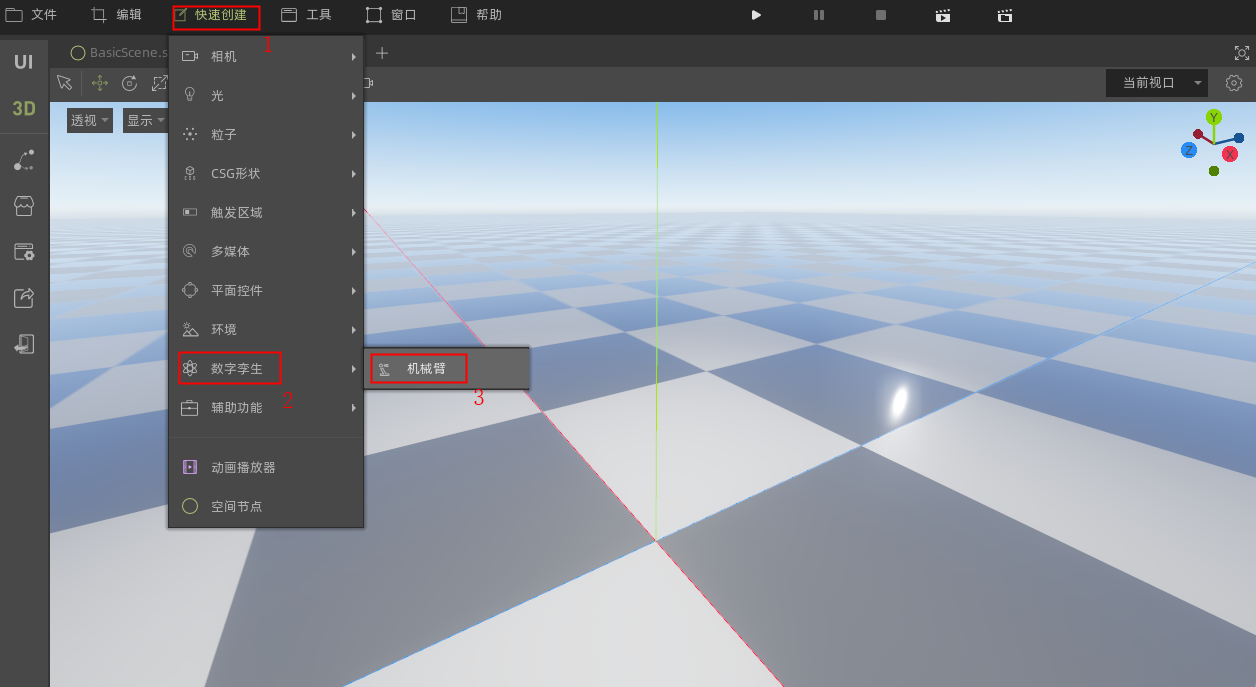
2、在快速创建中选择数字孪生,点击机械臂创建插件节点。
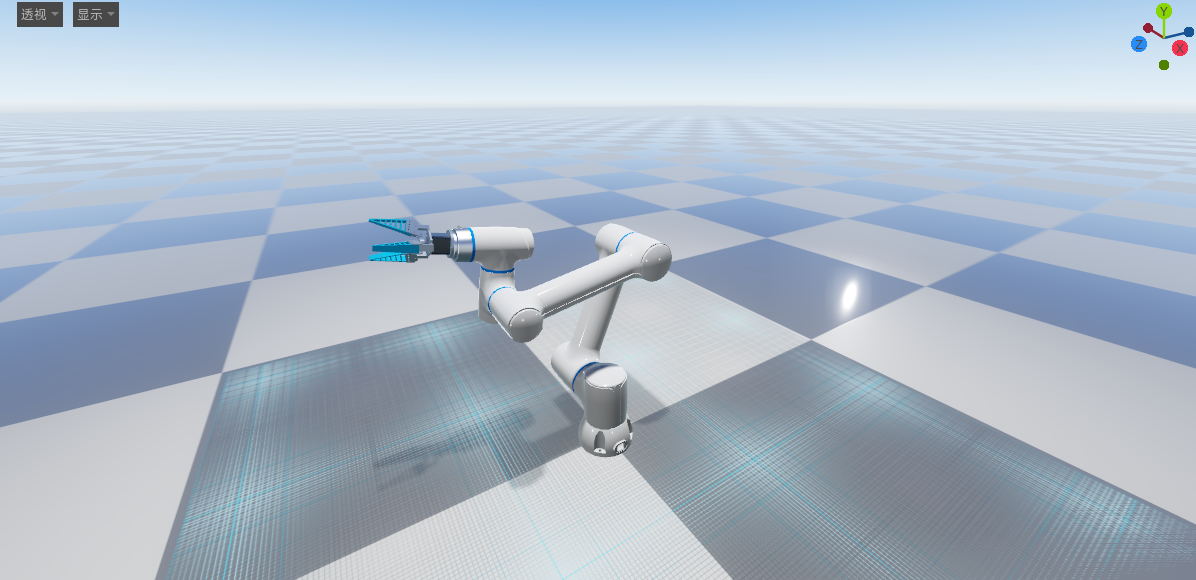
创建完成后效果如下
3、属性栏功能
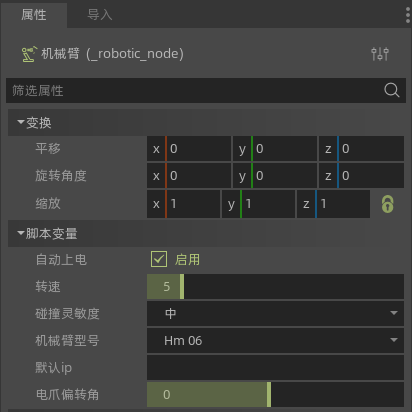
自动上电:在ip地址正确的情况下生效,可自动连接默认ip,上使能,直接进行其余操控。
转速:控制机械臂各关节角度转动的速度,支持从1~30的速度范围调节。
碰撞灵敏度:有零、低、中、高四种模式,用于控制机械臂碰到障碍物时进行保护。
机械臂型号:根据使用需求可以选取HM06和HM12两款型号。
默认ip:推荐运行前填写好默认ip,需要用户手动输入要控制的机械臂对应ip。
电爪偏转角:方便同步虚拟环境中机械爪模型的位置与实体机械爪保持一致。
PC运行使用
运行效果
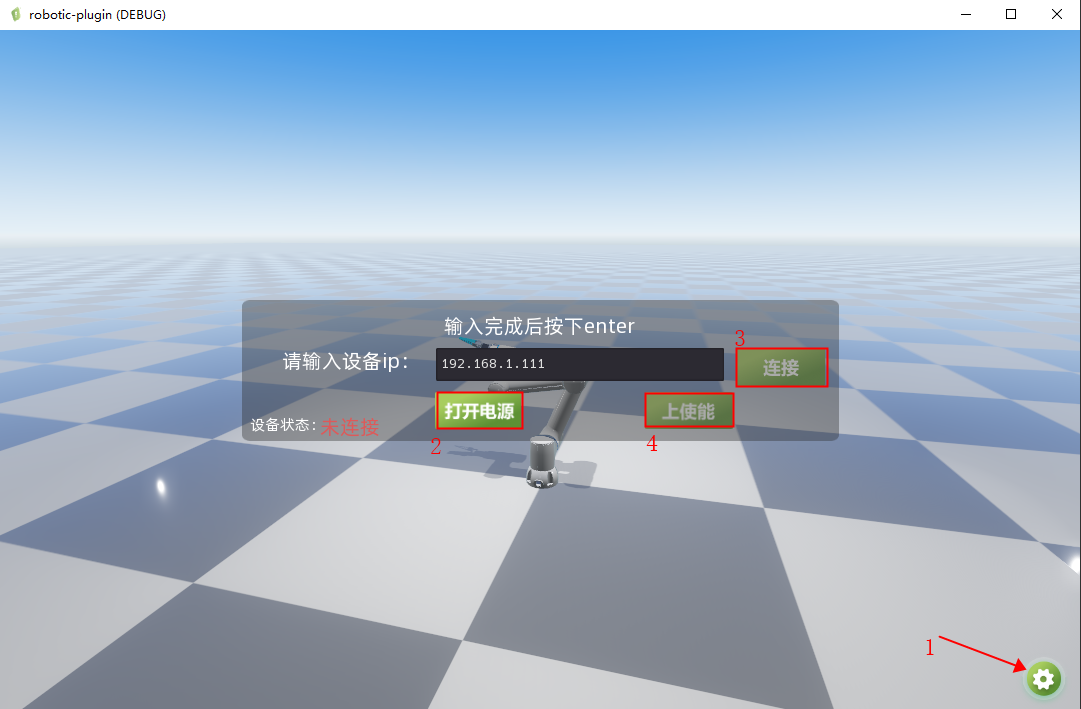
首先填写好对应的IP地址,以及其余相应的属性之后点击运行按钮。 运行界面如下:
然后按照以下步骤操作进行连接
1、首先点击右下角的设置图标按钮,会显示出进行连接的UI面板。
tip
运行之前填写好的默认ip会直接显示在输入栏中,如果没有提前填写好默认ip也可以在此界面填写。
2、接下来点击“打开电源”按钮,随后“连接”按钮亮起才可进行点击操作。
3、点击连接按钮,连接成功后左下角的设备状态会显示“连接成功”字样。
4、最后点击使能按钮便可以进行后续的其他操作。
使能之后场景中的机械臂模型各关节位置会同步现实场景中的物理机械臂。
基础界面
机械臂处于使能状态的时候其他控制ui才会显露如下,鼠标悬浮会显示按钮名称。
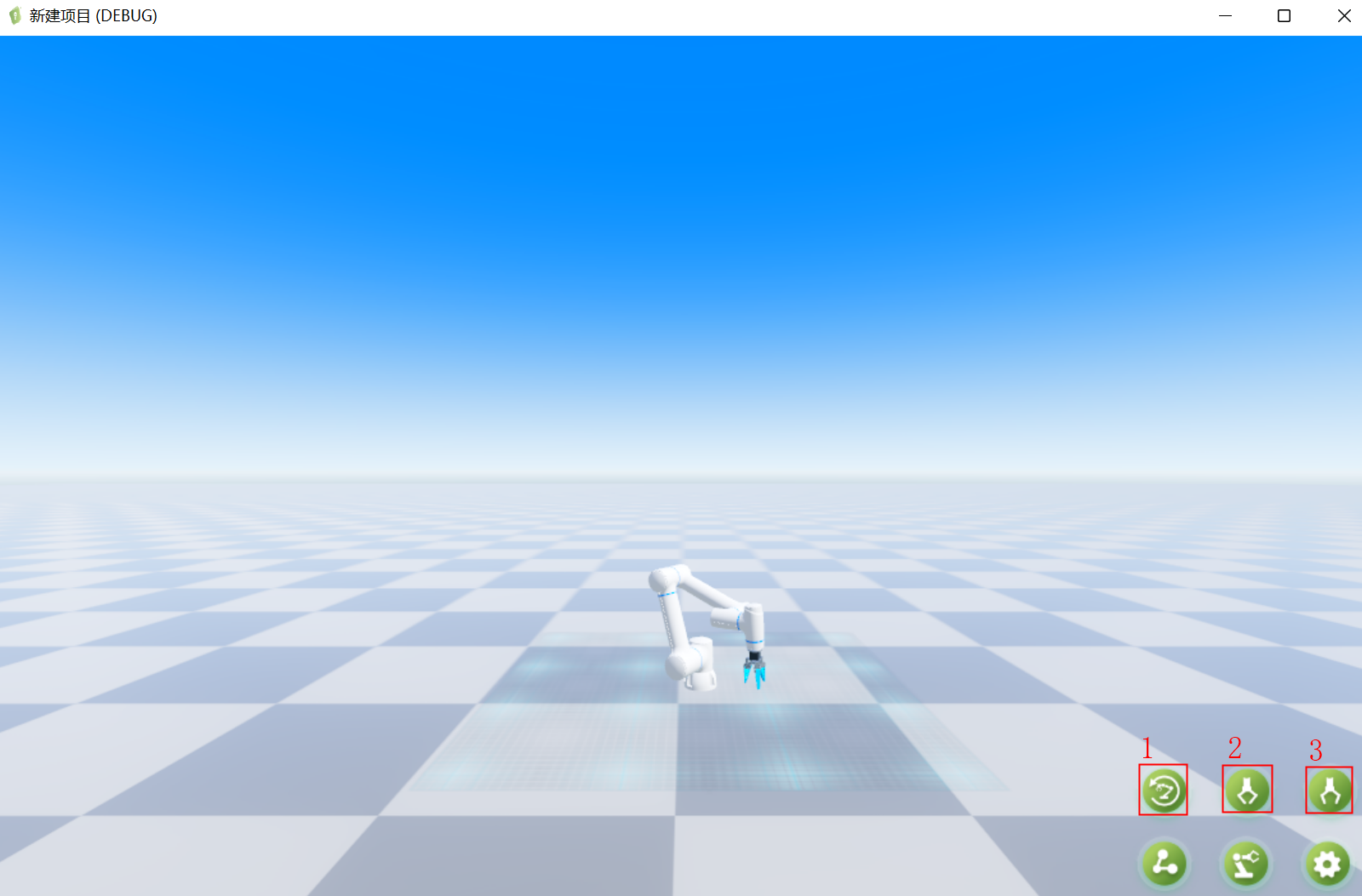
序号1:复位清错按钮,机械臂出现限位、碰撞等情况报错时可以直接点击此按钮进行清错重启,并恢复回默认位置。
序号2:电爪抓取按钮,控制场景中电爪为抓取状态。
序号3:对应的为电爪释放按钮,可以控制电爪进行松开。
关节模式
点击关节模式按钮,会出现如图所示的关节控制模式面板。
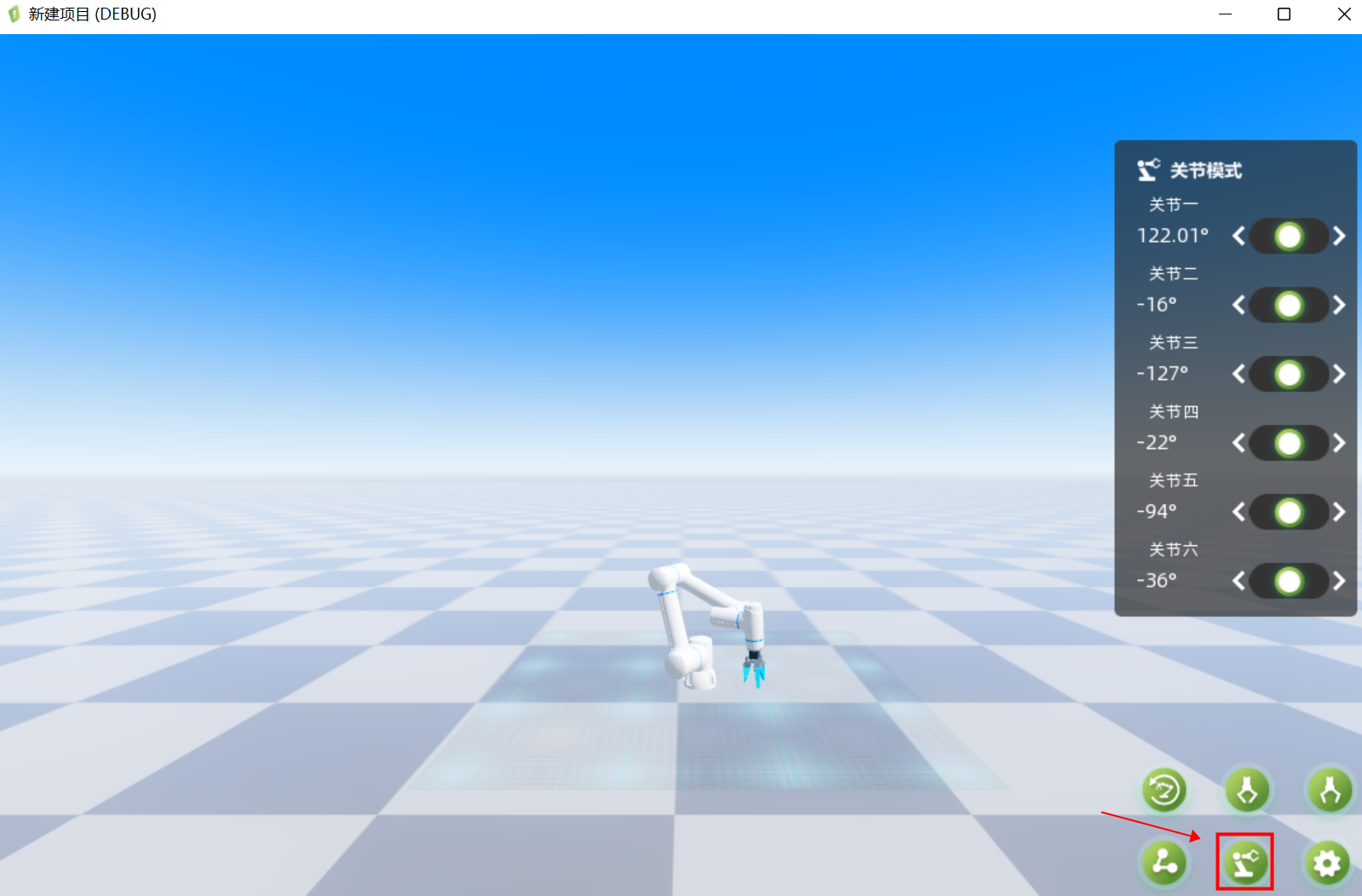
可以通过此面板圆形滑块进行直接拖拽控制机械臂个关节转动,也可以直接点击三角图标按钮进行相应的关节角度增减控制,对应的关节下会实时显示各关节目前的转动角度。
tip
注意关节三可转动角度范围为±165°,其余关节可转动角度范围皆为±175°,若达到关节限位角度会触发限位警报,直接断开机械臂连接,需要重新连接上使能
再次点击,关节控制模式窗口消失
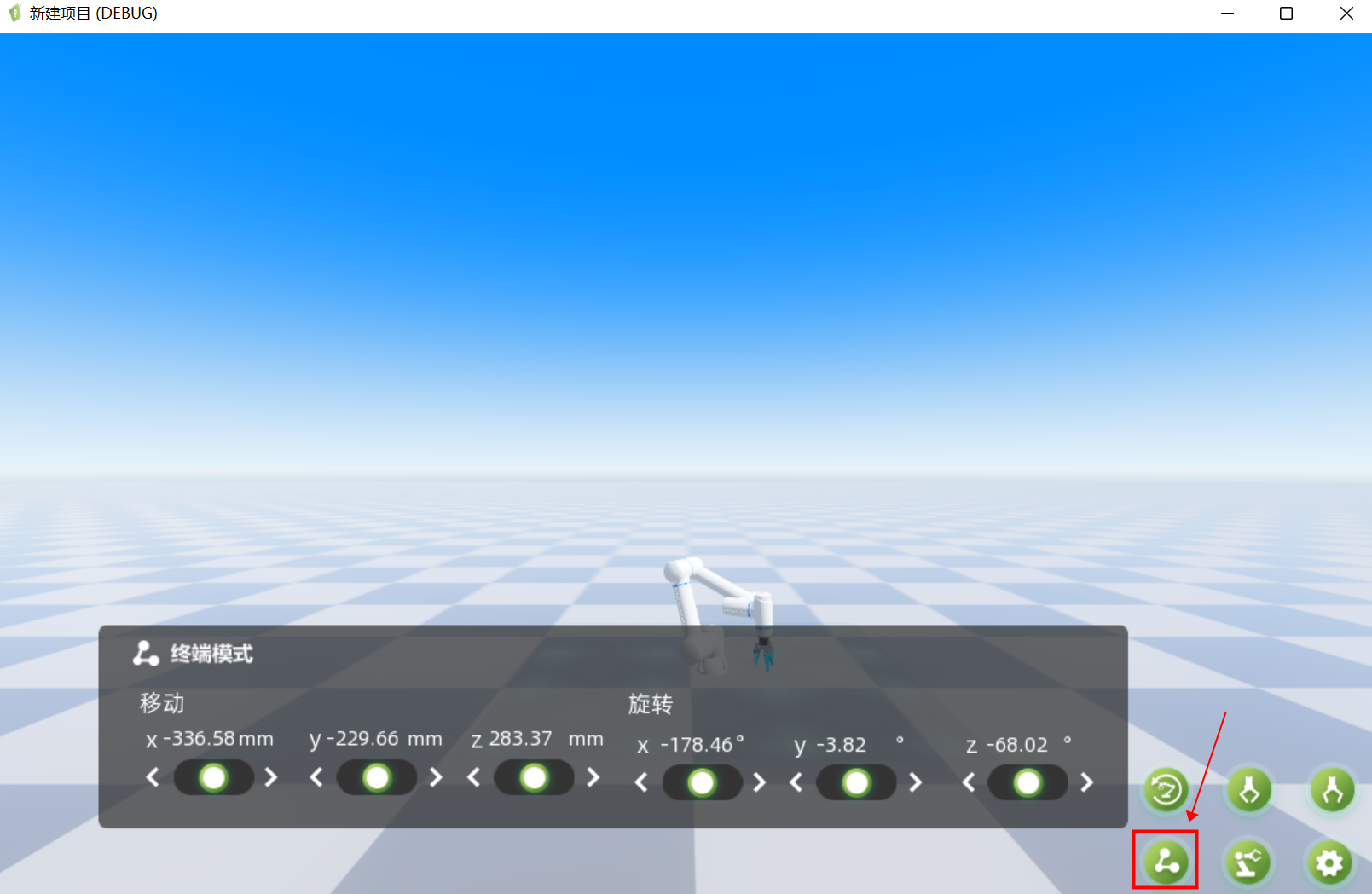
终端模式
以机械臂底座中心位置为坐标系原点,直接控制机械臂末端法兰在空间位置中进行移动。
tip
注意尽可能在机械臂处于相对蜷缩的状态下使用此方式进行控制,机械臂过于伸展时使用此方式容易造成关节限位
其余操作方式与关节模式相同,不做赘述。
交互开发
可视化脚本的使用
如果想让你操控的机械臂在某些情况下输出一些事件,比如当机械爪模型检测到要抓取的物体时,不想编写代码。可以利用可视化脚本中配置的机械臂触发器。
具体的使用方法如下:
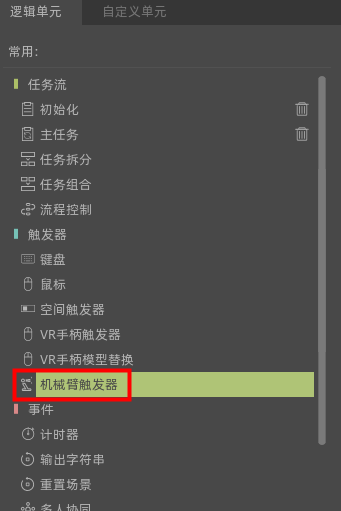
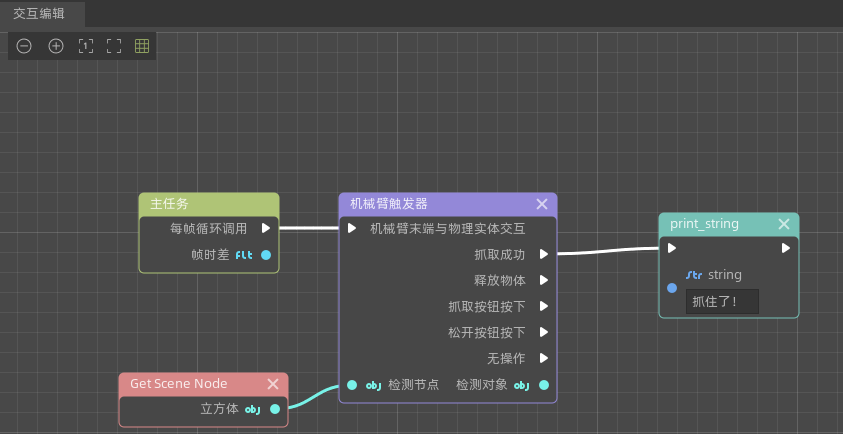
1、创建好一个可视化脚本,之后在逻辑单元中选择机械臂触发器。机械臂触发器的具体位置如图所示
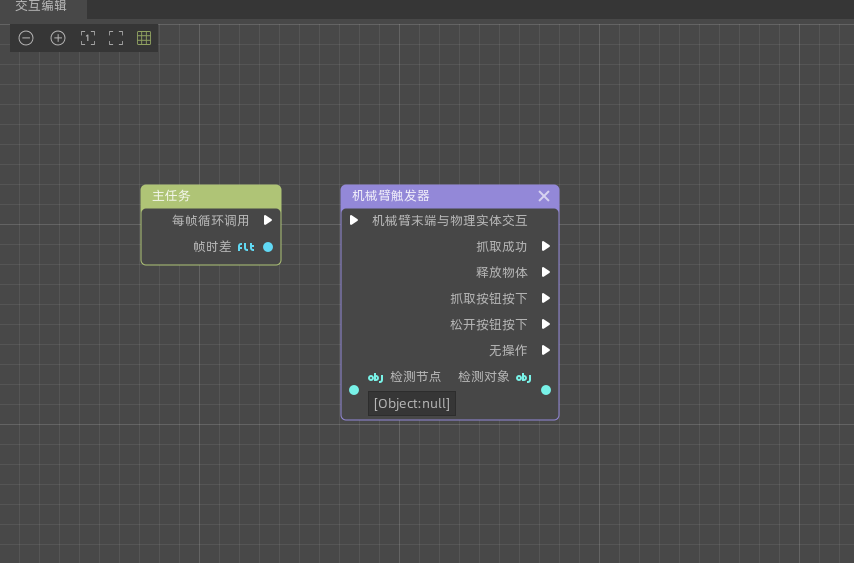
2、直接使用鼠标左键将机械臂触发器拖拽到交互编辑界面,创建一个主任务准备使用该触发器
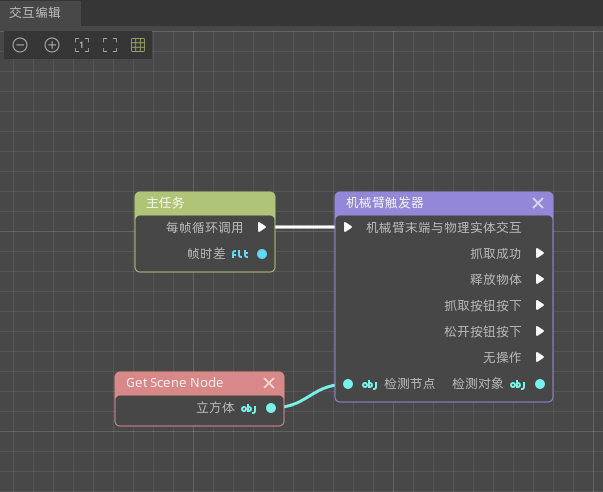
3、指定机械爪要检测并抓取的物体,这里举例为一个边长为5cm的正方体,在场景界面创建一个正方体后缩放到合适的尺寸再给节点添加刚体,同样将节点拖拽到交互编辑界面并连线
tip
不指定的话可以不连,会选择抓取检测到的距离最近的物体
4、选择对应输出事件输出任何想输出的东西,举例为打印一串字符。
以上就是可视化脚本针对机械臂插件的使用方法。
信号说明
机械臂插件拥有的信号如下图所示:
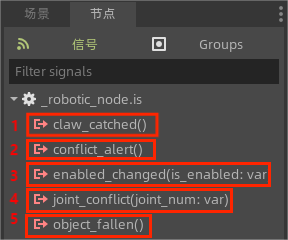
信号1:claw_catched(),机械爪成功夹住物体时发出
信号2:conflict_alert(),实体机械臂与障碍物发生碰撞时发出
信号3:enabled_changed(),使能状态发生改变时发出
信号4:joint_conflict(),虚拟场景中机械臂与障碍物发生碰撞时发出;joint_num,可以指定关节序号进行碰撞时警报。
信号5:object_fallen(),机械爪放开抓取到的物体或抓取到的物体发生掉落时发出。
用户可以根据自己的使用需要去进行信号的连接。